compute_bow_simple.cxx File Reference
#include "tests_config.hpp"#include <config.hpp>#include <utils/filesystem.hpp>#include <utils/numerics.hpp>#include <utils/dataset.hpp>#include <utils/vision.hpp>#include <utils/logger.hpp>#include <search/bag_of_words/bag_of_words.hpp>#include <iostream>#include <sstream>
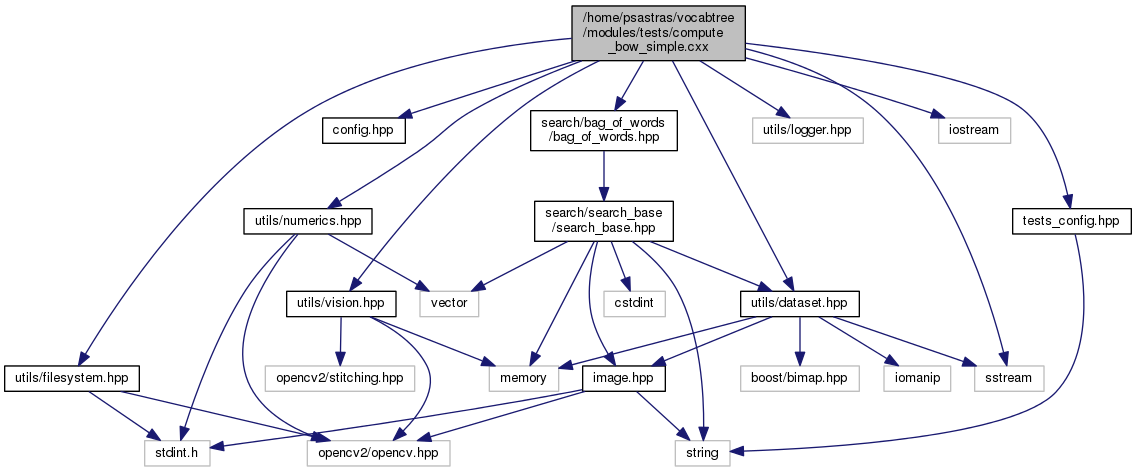
Include dependency graph for compute_bow_simple.cxx:
Go to the source code of this file.
Functions | |
| _INITIALIZE_EASYLOGGINGPP int | main (int argc, char *argv[]) |
Function Documentation
| _INITIALIZE_EASYLOGGINGPP int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 23 of file compute_bow_simple.cxx.
References vision::compute_bow_feature(), vision::construct_descriptor_matcher(), filesystem::create_file_directory(), filesystem::file_exists(), filesystem::load_cvmat(), s_oxfordmini_data_dir, s_oxfordmini_database_location, BagOfWords::save(), numerics::sparsify(), BagOfWords::train(), BagOfWords::vocabulary(), and filesystem::write_sparse_vector().
34 std::shared_ptr<BagOfWords::TrainParams> train_params = std::make_shared<BagOfWords::TrainParams>();
35 const std::vector< std::shared_ptr<const Image> > &all_images = simple_dataset.random_images(128);
43 vocab_output_file << simple_dataset.location() << "/vocabulary/" << train_params->numClusters << ".vocab";
54 const cv::Ptr<cv::DescriptorMatcher> &matcher = vision::construct_descriptor_matcher(bow.vocabulary());
62 const std::string &sift_descriptor_location = simple_dataset.location(all_images[i]->feature_path("descriptors"));
63 const std::string &bow_descriptor_location = simple_dataset.location(all_images[i]->feature_path("bow_descriptors"));
72 const std::vector< std::pair<uint32_t, float> > &bow_descriptors_sparse = numerics::sparsify(bow_descriptors);
- Generated by
 1.8.3.1
1.8.3.1